اصطکاک ایستایی و جنبشی
نیروی اصطکاک در بنیادیترین حالت به دو دستهی اصطکاک ایستایی» و جنبشی تقسیمبندی میشود.
اصطکاک ایستایی
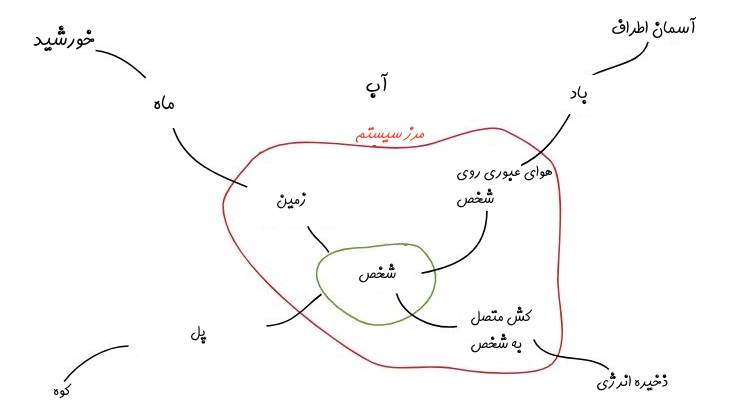
نیروی «اصطکاک ایستایی» (Static Friction) که معمولا آن را با نماد Fs نشان میدهند، به نیرویی گفته میشود که بین دو سطح برقرار بوده و باعث میشود دو سطح نسبت به یکدیگر ساکن قرار گیرند. برای نمونه مطابقِ شکل زیر شخصی را در نظر بگیرید که به یک جعبهی قرار گرفته روی زمین، نیرو وارد میکند.

تا زمانی که جعبه ساکن باشد، نیروی بین سطوح جعبه و زمین از نوع اصطکاک ایستایی است. جالب است بدانید نیرویی که به ما اجازه حرکت میدهد نیز از نوع اصطکاک ایستایی است.
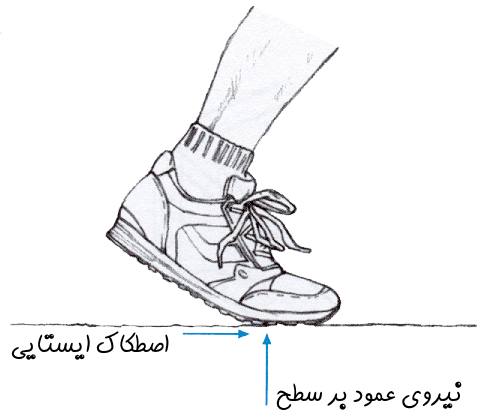
در حقیقت حرکتی نسبی بین پا و زمین وجود ندارد. در نتیجه نیروی بین آنها از نوع اصطکاک ایستایی محسوب میشود. اما اگر پا روی زمین کشیده شود، نیروی اصطکاک از نوع جنبشی است. بنابراین جهت تشخیص نوع نیروی بین دو سطح، به این نکته توجه فرمایید که آیا دو سطح نسبت به هم ساکن یا در حال حرکت هستند.
اصطکاک جنبشی
شکل ۱ را در نظر بگیرید. فرض کنید نیروی وارد شده از جانب شخص به تدریج افزایش مییابد. نهایتا نیرو به اندازهای میرسد که جعبه به حرکت در میآید. در این حالت جعبه در حال حرکت بوده و زمین نیز نیرویی در خلاف جهت حرکتِ جعبه به آن وارد میکند؛ به این نیرو، «اصطکاک جنبشی» (Kinetic Friction) گفته میشود. معمولا در روابط، اصطکاک جنبشی را با نماد Fk نشان میدهند. این همان نیرویی است که هوای اطراف به خودروی در حال حرکت وارد میکند.
رابطه میان ضریب اصطکاک جنبشی و ایستایی
اصطکاک ساکن بین دو سطح همیشه بیشتر از اصطکاک جنبشی است (حداقل در کاربردهای عملی و واقعی). اما چرا اینگونه است؟ برای کشف این موضوع باید علتهای بروز اصطکاک جنبشی و ایستایی را بررسی کنیم.
صرف نظر از اینکه یک سطح چه قدر ماشینکاری شده و صیقل خورده است باز هم برجستگی و فرورفتگیهایی دارد. این ناصافیها شرایطی مانند شکل زیر را پدید میآورد و سبب میشود تا شروع حرکت جسم سختتر باشد.
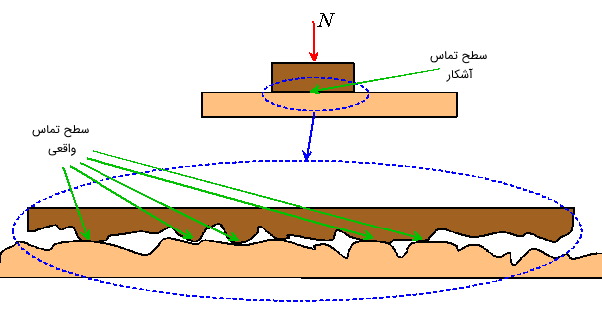
با شروع حرکت ناصافیهای هر دو سطح روی یکدیگر میلغزند و این امر باعث میشود تا نیروی اصطکاک جنبشی کمتر از نیروی اصطکاک ایستایی باشد و در نتیجه ضریب اصطکاک جنبشی نیز کمتر از ضریب اصطکاک ایستایی به دست میآید.
فرمولهای اصطکاک
دو دستتان را روی هم قرار دهید و آنها را روی هم بکشید. هرچه دستانتان را بیشتر به هم بفشارید، نیروی اصطکاک بین دو دست نیز بیشتر خواهد بود.

حال اگر دستکشی را بدست کرده و همین کار را تکرار کنید نیروی اصطکاکی بیشتری را حس خواهید کرد. در حقیقت اندازه نیروی اصطکاک جنبشی به جنس دو سطح و اندازه نیروی عمودی آنها وابسته است. پارامتری تحت عنوان ضریب اصطکاک جنبشی که با نماد μkμk نشان داده میشود، وابسته به جنس دو سطحی است که در تماس با یکدیگرند.
اگر ضریب اصطکاک جنبشی بین دو سطح برابر با μkμk باشد، نیروی اصطکاک از رابطه زیر بدست خواهد آمد.
در رابطه بالا Fn مقدار نیروی عمودی بین دو سطح است. برای نمونه مثال جعبه را در نظر بگیرید. در مثال مذکور Fn نیروی عمودی است که زمین و جعبه به یکدیگر وارد میکنند. توجه داشته باشید که رابطه فوق را میتوان بهصورت μk=FkFnμk=FkFn نیز بیان کرد. رابطه مذکور نشان میدهد که ضریب اصطکاک جنبشی، مقداری بیبعد است.
همانطور که در بالا نیز عنوان شد، نیروی بین دو سطح در زمانی که نسبت به هم ساکن باشند، از نوع ایستایی محسوب میشود. برای نمونه شکل ۱ را در نظر بگیرید. هرچه نیروی وارد شده به جعبه بیشتر باشد، نیروی بین زمین و جعبه (یا همان نیروی اصطکاک ایستایی) نیز به همان اندازه افزایش مییابد.
اما بدیهی است که با افزایش پیوسته نیرو، جعبه ساکن نخواهد ماند و نهایتا حرکت خواهد کرد. بیشترین نیروی اصطکاک ایستاییِ ممکن بین دو سطح با استفاده از رابطه زیر بدست میآید.

توجه داشته باشید که رابطه فوق، بیشترین نیروی اصطکاک ایستایی و نه خودِ نیروی اصطکاک را به شما میدهد. در حقیقت اندازه نیروی اصطکاک ایستایی برابر با اندازه نیروی وارد شده به جسم است. با مطالعه مثالهای زیر به مبحث اصطکاک مسلط خواهید شد.
درست در لحظهای که نیروی اصطکاک ایستایی به بیشترین مقدار خود برسد، با افزایش اندک نیرو، جسم به حرکت در آمده و نیروی بین دو سطح از نوع اصطکاک جنبشی میشود.
تعریف حرکت دایره ای
حرکت دایرهای یکنواخت به حرکتی گفته میشود که در آن یک جسم روی مسیری دایرهای با سرعتی ثابت در حرکت باشد. برای نمونه پره موتور جتی را در نظر بگیرید که با سرعتی ثابت در حال گردش است؛ یا حرکت چرخ و فلکی را تصور کنید که تعدادی از افراد نیز سوار بر آن هستند. در تمامی این مثالها با حرکت دایرهای سروکار داریم.

همانطور که پیشتر نیز در وبلاگ فرادرس توضیح داده شد، شتاب زمانی وجود دارد که اندازه سرعت جسمی با گذشت زمان تغییر کند. بنابراین در این جا این سوال مطرح است که آیا در حرکت روی مسیر دایرهای، شتابی وجود دارد؟
پاسخ سوال فوق مثبت است. دلیل وجود داشتن شتاب، تغییر جهت سرعت با گذشت زمان است. به منظور درک بهتر، در ابتدا شکل زیر را در نظر بگیرید.
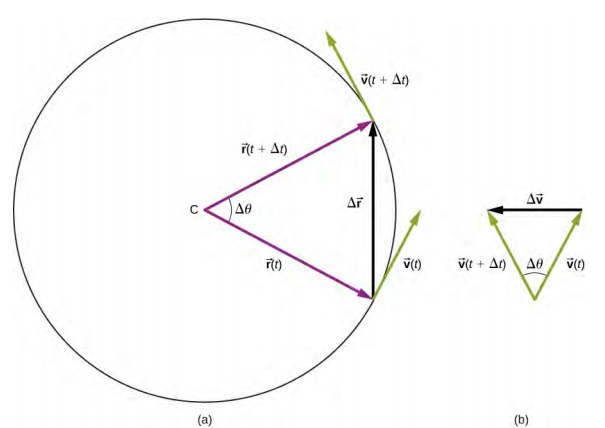
همانطور که در شکل فوق نیز میبینید، جهت بردار سرعت با گذشت زمان تغییر میکند. همین امر کافی است تا جسم، شتابی را روی خودش حس کند. به منظور بدست آوردن شتاب در حرکت دایرهای، در ابتدا رابطه مربوط به محاسبه شتاب را به صورت زیر یادآوری میکنیم.

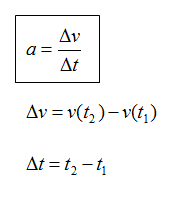
در رابطه فوق، المانها به صورت برداری هستند. در بخش بعد از این فرمول استفاده کرده و شتاب را برای حرکت دایرهای بدست میآوریم.
شتاب مرکزگرا
در سینماتیک یکبعدی، اجسامی با سرعت ثابت، شتابی ندارند. اما در حرکت دایرهای به دلیل تغییر جهت سرعت با زمان، شتاب نیز وجود دارد. در ابتدا مطابق با شکل ۱ ذرهای را در نظر بگیرید که روی مسیری دایرهای در حال حرکت است. همانطور که میبینید سرعت در لحظه t برابر با →v(t)v→(t) و در لحظه t+Δtt+Δt معادلِ →V(t+Δt)V→(t+Δt) در نظر گرفته شده.
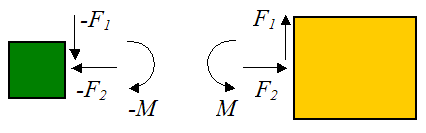
محاسبه شتاب مرکز گرا:
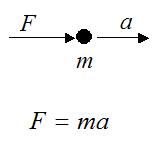
به شکل زیر نگاه کنید تا همه چیز برایتان مشخص شود:

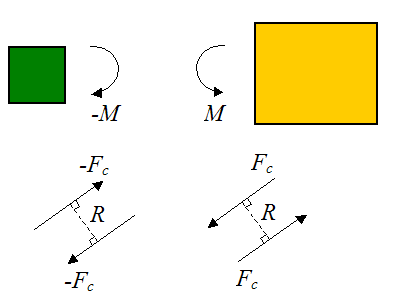
از شتاب مرکز گرا نیز داریم: F=ma = m(v2/r)
با توجه به شکل زیر می بینیم که نیروی مرکزگرا با مجذور سرعت متناسب است. اگر نیروی مرکزگرا تنها به دلیل نیروی اصطکاک سطح ایجاد شده باشد و اصطکاک ناچیز باشد، افزایش سرعت موجب لیزخوردن خیلی زیاد جسم در مسیر دایره ای خواهد بود؛ مثلا سر خوردن ماشین در انحنای جاده ای که در اثر بارش برف یا باران لیز شده است.



 که برابر است با:
که برابر است با:


